PROPAGATION SONAR OU RADAR : UNE APPROCHE UNIFIEE
M.C. PELISSIER (1) * †, C. NOEL (2) *, E. MANDINE (2) †, F. STURM (1) *
(1)
Laboratoire MNC Modélisation Numérique et CouplagesI.S.I.T.V Université de Toulon et du Var, B.P. 56, 83162 LA VALETTE DU VAR Cedex, France
mél : mcpel@isitv.univ-tln.fr
(2)
Semantic TS.39 Ch Buge 83110 SANARY, France
* Travaux réalisés en collaboration entre le laboratoire MNC et le centre d’Expertise et d’Essais CTSN/DLSM
†
Travaux réalisés en collaboration entre le laboratoire MNC et le centre d’Expertise et d’Essais CTSN/LAS
RESUME : Le calcul énergétique des pertes par propagation en acoustique sous-marine, comme celui des facteurs de propagation pour la représentation des couvertures radars est fondamental pour la détection passive. Or la précision et la confiance dans les prédictions dépendent de manière essentielle de la connaissance de l’environnement et de son influence sur la propagation.
Après avoir présenté les deux problèmes (sonar et radar) on s’attache à mettre en évidence leur similitude. Cinq traits communs sont en particulier dégagés, qui vont permettre de construire des modèles d’équations aux dérivées partielles connus dans la littérature sous le nom de "modèles paraboliques". Les modèles classiques font l’hypothèse d’une symétrie azimutale de l’environnement et ne prennent en compte que les variations grande échelle du milieu océanique ou atmosphérique. Nous généralisons les modèles et présentons des résultats numériques dans trois directions : modélisation de la propagation acoustique en environnement marin variable tridimensionnel, sans hypothèse de symétrie azimutale du fond; et prise en compte des phénomènes environnementaux fine échelle dominants en sonar (ondes internes) et en radar (turbulences) par construction de modèles d’équations aux dérivées partielles stochastiques résolus directement, sans appel à des procédures de type Monte-Carlo. Dans les trois cas et en accord avec les mesures expérimentales on observe des modifications des champs bien supérieures à 5 dB.
ABSTRACT : "
Sonar or radar propagation : a unified approach". Partial differential equations models describing sonar or radar propagation in realistic environments are presented here : variations of large scale characteristics of the propagation medium are considered as well as fine scale perturbations due to internal waves (ocean) or turbulence (atmosphere).After a brief presentation of both problems (sonar and radar) we focus on their similarity. We show that, in many realistic environmental cases, it is possible to reduce Maxwell system, which accounts for radar propagation, to a scalar equation generalizing the Helmholtz equation of underwater acoustics. Both cases can thus be treated in the same way. Next, five main common features between horizontal sonar propagation and horizontal low stratosphere radar propagation problems are drawn. They allow, by simplification of the basic models, to obtain the so called "parabolic models" and to construct, on this new basis, much more efficient propagation software’s. The example of a three dimensional wedge-shaped wave guide, in underwater acoustics propagation, is then presented, with no cylindrical symmetry. We chose to ignore here, the many theoretical and numerical difficulties we had to overcome to build the fully three-dimensional solver TRIPARADIM we use. As expected, pronounced horizontal refraction effects are shown, that cannot be taken into account by two-dimensional standard models. The effects of fine scale perturbations of the medium are then studied. We show that internal waves for sonar propagation and turbulence for radar propagation are dominant characteristics among fine scale variations. We observe too that modeling of internal waves in the first case, or of turbulence in the second case, are in deep connection, and in particular that both perturbations can be introduced as noises in the models, leading to similar stochastic partial differential equations . These noises are simulated by constructing fluctuation generators based on realistic internal waves or turbulence spectra. We then build, directly from the stochastic models, the momentum equations. As far as mean (first moment) is concerned, its equation appears to be closely related to the standard unperturbed equation, and modification of the numerical solver is then straightforward. We thus need only one calculation to achieve the type of result that would have taken 150 by a Monte-Carlo statistical approach. Numerical examples are presented, both for sonar and radar, showing, as predicted by experiments, non negligible influence of fine scales perturbations of propagation. We conclude with general considerations about mathematical modeling and numerical simulation of complex phenomena.
A
Fonction d’autocorrélation desfluctuations verticales de l’indice sonore
A
Fonction d’autocorrélation desfluctuations verticales de l’indice
a Rayon de la terre
a 1 Atténuation
j Azimut angulaire
![]() Célérité de référence
Célérité de référence
C Partie déterministe de la célérité
c Célérité du son
Vitesse de phase de l’onde électromagnétique
d Distribution de Dirac
d C Partie aléatoire de la célérité
D Opérateur Laplacien
e Permittivité absolue
e r Permittivité relative
![]() Permittivité du vide
Permittivité du vide
![]() Vecteur champ électrique
Vecteur champ électrique
F Facteur de propagation (radar)
![]() Opérateur gradient
Opérateur gradient
![]() Fonction de Hankel
Fonction de Hankel
![]() Vecteur champ magnétique
Vecteur champ magnétique
![]() Norme du vecteur d’onde de référence
Norme du vecteur d’onde de référence
![]() Vecteur d’onde
Vecteur d’onde
k Norme du vecteur onde
Lh Longueur de corrélation horizontale
Lv Longueur de corrélation verticale (sonar)
L0v Echelle externe de la turbulence selon la verticale
m Indice modifié de réfraction
m0 Valeur moyenne du profil d’indice modifié
n Indice de réfraction
n0 Valeur moyenne du profil d’indice
n1 Composante aléatoire de l’indice
P Pression acoustique (dépend du temps)
p Pression acoustique (indép. du temps)
m Perméabilité magnétique absolue
µr Perméabilité magnétique relative
![]() Perméabilité magnétique du vide
Perméabilité magnétique du vide
![]() Vecteur position
Vecteur position
r Altitude en radar (rep. sphérique)
Distance en sonar (rep. cylindrique)
![]() Opérateur rotationnel
Opérateur rotationnel
r Densité
s Distance horizontale (radar)
t Temps
TL Pertes acoustiques (sonar)
q Site angulaire (rep. sphérique)
Azimut angulaire (rep. cylindrique)
u Champ sonore
U Enveloppe de la composante azimutale du champ ![]()
z Immersion (sonar)
L’énergie sonore, rayonnée ou émise par un navire, se propage très bien dans le milieu marin, tout particulièrement en basses fréquences pour lesquelles elle peut être détectée à des milliers de kilomètres du lieu d’émission.
Le but étant avant tout d’être silencieux, les bruits ont été considérablement réduits dans les sous-marins modernes, surtout en hautes fréquences ; leurs signatures acoustiques ne comportent plus de raies au-dessus de quelques centaines de Hertz. Les fréquences acoustiques d’intérêt ont donc diminué depuis les années 1975 ; la portée des sonars a augmenté, accentuant encore l’influence de la propagation sur leurs performances.
L'optimisation des performances des sonars dans un but de prédiction de portées correctes, et la conception de nouveaux sonars à partir d'études paramétriques imposent ainsi une meilleure connaissance des différents effets du milieu marin sur la propagation sonore.
C'est dans ce cadre qu'ont été développés les modèles présentés ici destinés à simuler la propagation acoustique en environnement océanique réaliste. Ils sont le fruit d'une collaboration à travers deux thèses [1] [2] entre le Laboratoire Modélisation Numérique et Couplages (anciennement ETMA) de l'Université de Toulon-Var et le centre DCE/CTSN/DLSM (anciennement GERDSM) du Brusc, près de Toulon.
Des problèmes analogues se posent pour l'étude des radars. De même qu'un sonar utilise la présence d'ondes acoustiques, le principe d'un radar est basé sur l'émission directionnelle d'une onde électromagnétique et sur la mesure d'un écho éventuel renvoyé par une cible lointaine afin de détecter, poursuivre et identifier la cible en mouvement. Le "volume" d'atmosphère situé entre le radar et la cible va jouer, comme tout canal de propagation, un rôle majeur dans le niveau du signal reçu, et donc la qualité de la réception. Actuellement les radars "voient" de plus en plus loin et analysent de plus en plus vite devant des menaces également plus rapides et évoluées : le besoin de connaître les capacités réelles des radars rapidement, avec un degré de fiabilité satisfaisant, est donc bien une nécessité en tant qu'aide à la décision et au commandement. Là encore, comme pour les sonars, la précision et la confiance dans les prédictions de couverture radar dépendent, de nos jours, de manière essentielle de la connaissance de l'environnement et de son influence sur la propagation.
C'est dans ce contexte qu’a été menée l'étude de la modélisation et de la simulation numérique de la propagation radar en présence de turbulences atmosphériques. La collaboration entre le Laboratoire Modélisation Numérique et Couplages de l'Université de Toulon-Var et le centre DCE/CTSN/LAS de Saint Mandrier, près de Toulon s'est développée à travers une thèse [3].
Nous présentons ici des modèles d'équations aux dérivées partielles décrivant la propagation sonar ou radar dans des cas réalistes d'environnement : les caractéristiques à grande échelle du milieu peuvent varier au cours de la propagation, et des phénomènes perturbatifs petite échelle (ondes internes ou turbulence par exemple) se superposent à cette variation.
Après avoir présenté les deux problèmes (sonar et radar) de manière générale, on s'attache dans la partie II à mettre en évidence leur similitude. On montre en particulier qu'il est souvent (en termes de conditions environnementales) possible de ramener le système vectoriel de Maxwell, modélisant la propagation radar, à une équation scalaire généralisant l'équation d'Helmholtz de l'acoustique sous-marine. Les deux cas peuvent alors être traités de manière similaire. Dans la partie III, cinq traits communs aux problèmes de propagation sonar horizontale ou radar horizontale en basse stratosphère sont dégagés. Ils permettent de simplifier les modèles présentés au II, et ainsi de construire, sur cette nouvelle base, des codes numériques beaucoup plus performants. Dans la partie IV, comme illustration, est présenté un exemple en 3 dimensions d'espace de propagation acoustique sous-marine en présence d'un plan incliné. Nous avons choisi de passer sous silence les nombreux problèmes théoriques et numériques que nous avons résolus pour écrire le code pleinement tridimensionnel TRIPARADIM ayant permis les calculs présentés. L'environnement ne présente donc pas de symétrie cylindrique et l'on met en évidence des déviations horizontales non négligeables du champ sonore, qui ne peuvent être prédites par les modèles bidimensionnels classiques. Dans les parties V et VI on se propose de mettre en évidence l'influence des fluctuations petite échelle de l'environnement. On montre que les phénomènes petite échelle d'influence dominante sur la propagation sont les ondes internes pour le sonar et entre autres la turbulence pour le radar. On observe également que la modélisation des ondes internes dans le premier cas et de la turbulence dans le second cas présentent de profondes analogies et qu'en particulier leurs rapports d'échelle permettent de les introduire sous forme de bruits dans les modèles, conduisant à des équations aux dérivées partielles stochastiques similaires dans les deux cas. Ces bruits sont simulés en construisant des générateurs de fluctuations basés sur des spectres réalistes d’ondes internes ou de turbulence On obtient alors, directement à partir du modèle stochastique, les équations aux moments. Celles relatives à la moyenne s’avérant du même type que les modèles utilisés en l'absence de fluctuations, on peut leur adapter facilement les codes de calcul. On remplace ainsi les quelques 150 calculs qu'aurait nécessité, pour résoudre le même problème, une approche statistique de type Monte-Carlo, par un seul calcul. Des exemples sont présentés en partie V pour le sonar et en partie VI pour le radar, montrant une influence non négligeable de ces perturbations fine échelle du milieu. Dans la conclusion, en partie VII, quelques questions d'ordre général sont soulevées à propos de la modélisation mathématique et de la simulation numérique de phénomènes complexes.
Dans les zones où le milieu marin peut être considéré comme faiblement hétérogène, sa densité et sa célérité c varient à cause des hétérogénéités, mais peu autour de leurs valeurs moyennes. Physiquement ces deux types de fluctuations n'ont pas les mêmes effets, et les fluctuations de densité jouent un rôle pratiquement négligeable dans la propagation des ondes acoustiques. L'environnement marin peut réalistement être représenté comme la juxtaposition de zones faiblement hétérogènes. Dans une telle zone, et en dehors de la source, la pression acoustique P vérifie l'équation des ondes :
(1.1) ![]()
t désignant le temps, D l'opérateur Laplacien en espace.
Le milieu océanique constituant un guide d'onde volumique de très grandes dimensions, la résolution du problème (2) s'avère d'une grande complexité dès que l'on veut prendre en compte toutes les caractéristiques du milieu océanique. De ce fait, une hypothèse généralement admise consiste à considérer localement, au voisinage d'un plan vertical, une symétrie cylindrique du problème physique et ainsi à en négliger la dépendance par rapport à la direction horizontale transverse au plan vertical considéré. Cette hypothèse revient à éliminer, dans l'équation (1.1), les termes tenant compte de la diffraction horizontale de l'énergie dans un plan vertical différent de celui de l'émission de l'onde. On est ainsi ramené d'un problème tridimensionnel (3D) à un problème bidimensionnel (2D). La résolution est donc considérablement allégée. Cette simplification est à l'évidence mise en défaut dès que des phénomènes physiques typiquement tridimensionnels sont présents. Par exemple, la présence de fronts thermiques dus à la jonction de courants sous-marins chauds et froids, de tourbillons et /ou l'irrégularité des fonds sous-marins (monts sous-marins, abysses, talus continentaux, plaines continentales...) peuvent considérablement influer sur la trajectoire des rayons sonores. L'énergie émise dans un plan vertical peut ainsi être redirigée dans un plan adjacent (réfraction horizontale du champ sonore). De nombreux travaux ont permis de mettre en évidence de tels effets 3 D.
Il est donc apparu nécessaire de disposer d'un code de calcul pleinement tridimensionnel, capable de traiter le problème en toute généralité et de prévoir les effets 3D.
Par petits fonds le problème est encore plus compliqué : la propagation d'une onde sonore s'effectuant essentiellement par réflexions successives sur le fond de l'eau, les phénomènes d’interaction avec le fond s'avèrent être prépondérants sur la propagation acoustique. Outre les effets tridimensionnels, il est alors indispensable de prendre en compte les caractéristiques des couches sédimentaires (sédiments fluides, sable, vase, roches) constituant le fond, ce qui nécessite la réécriture de modèles de propagation sonore en milieu élastique. Ce sujet, qui fait actuellement l'objet d'une thèse [26] en collaboration entre le Laboratoire MNC et le centre DGA/DCE/GESMA de Brest, ne sera pas évoqué dans cet article.
Si c0 est la célérité de référence.
(1.2) ![]()
désigne l'indice de réfraction du milieu et dépend des trois variables d'espace. Il est proche de 1 dans le cas d'un milieu faiblement hétérogène.
Pour une description réaliste de l'environnement, la célérité c peut être considérée comme la superposition d'une partie déterministe C (correspondant aux fluctuations de célérité du milieu liées aux variations de grande échelle -circulation océanique- et mésoéchelle -conditions météorologiques-) et d'une partie aléatoire d C (correspondant aux fluctuations de petite échelle du milieu, dont la présence éventuelle d'ondes internes est la cause prédominante).
(1.3) c = C + d C
C sera typiquement une donnée bathycélé-rimétrique et les caractéristiques statistiques de la fluctuation d C seront obtenues soit expéri-mentalement à partir de mesures en mer réalisées à des instants différents, soit sur la base de spectres (correspondant à des fonctions de corrélation gaussienne, ou delta-corrélée ; ou spectre de Garrett et Munk) eux-mêmes validés expérimen-talement.
n étant très proche de 1 dans l'océan nous obtiendrons ainsi n2 sous la forme
(1.4) ![]() où
où
Si la source émettrice est monochromatique de pulsation w , la pression acoustique sera également de la forme
![]()
![]() désigne le vecteur position et on continuera à désigner p par le terme pression acoustique.
désigne le vecteur position et on continuera à désigner p par le terme pression acoustique.
On obtient l'équation (dite de Helmholtz)
![]()
![]()
que l'on réécrit sous la forme
(1.6) ![]()
avec ![]()
La modélisation mathématique de la propagation des ondes électromagnétiques débute, quel que soit le milieu, par l'écriture des équations de Maxwell. Sous les hypothèses usuelles de description de l'atmosphère, celles-ci permettent d'obtenir en dehors des sources les deux équations de propagation suivantes :
(2.1.1) ![]()
(2.1.2) ![]()
où ![]() sont respectivement les vecteurs champ électrique et champ magnétique dépendant du vecteur position
sont respectivement les vecteurs champ électrique et champ magnétique dépendant du vecteur position ![]() et du temps t, (e
, µ) la permittivité et la perméabilité magnétique absolues,
et du temps t, (e
, µ) la permittivité et la perméabilité magnétique absolues, ![]() les opérateurs gradient et rotationnel.
les opérateurs gradient et rotationnel.
On retrouve donc l'équation des ondes (1.1) qui régissait déjà la pression acoustique, avec un terme supplémentaire, terme de dépolarisation de l'onde. Mais la complexité du problème a été considérablement augmentée puisqu'en 3D, il y a 6 inconnues (les 3 composantes de chacun des deux champs) au lieu d'une...
On se limitera dans la suite à la construction d'un modèle 2D.
L'objectif de l'étude effectuée étant d'étudier l'influence de la turbulence sur la propagation radar, une hypothèse de symétrie azimutale a été faite. Il est bien évident que, en analogie à ce qui a été dit au 1) c) pour l’acoustique sous-marine, cette hypothèse n’est pas vérifiée dans certains cas.
Les simulations de couverture radar qui seront présentées le seront sous une hypothèse de terrain plan. Une étude pour la prise en compte d’un terrain variable a fait l’objet d’un contrat entre la société Semantic TS et le centre DCE/CTSN/LAS [27], et ne sera pas développée dans le cadre de cet article.
La propagation électromagnétique dans l'atmosphère terrestre diffère de la propagation dans le vide par le fait que les ondes se propagent à une vitesse de phase c, inférieure à la célérité c0 de la lumière : le rapport de ces deux vitesses
(2.2) ![]()
définit l'indice de réfraction, grandeur essentielle lorsque l'on veut décrire la manière dont un milieu va réagir à l'excitation d'un champ électromagnétique extérieur. D'autre part une simple observation de la couche atmosphérique suffit pour considérer l'atmosphère comme un milieu fortement hétérogène.
La vitesse de phase de l'onde dans l'atmosphère est donnée par ![]() , et par définition la célérité de la lumière par
, et par définition la célérité de la lumière par ![]() où (e
0 , m
0 ) désignent les permittivité et perméabilité du vide. Ainsi l'indice de réfraction
où (e
0 , m
0 ) désignent les permittivité et perméabilité du vide. Ainsi l'indice de réfraction ![]() s'écrit :
s'écrit :
![]()
avec (e r , m r ) permittivité et perméabilités relatives.
Pour l'air atmosphérique et dans la gamme de fréquences sélectionnées, m
r peut être supposé égal à 1 et n est simplement donné par la relation ![]() .
.
Pour décrire les évolutions de n dans la troposphère nous distinguerons, comme nous l'avons fait en propagation acoustique sous-marine, deux échelles différentes : les variations spatiales "grande échelle", relativement stables, liées à des mouvements de l'atmosphère de tailles caractéristiques importantes, et des fluctuations "fine échelle", beaucoup plus chaotiques et rapides qui viennent se superposer aux premières (et essentiellement liées à la turbulence atmosphérique). Nous ferons apparaître cette distinction en décomposant la permittivité sous la forme
(2.3) ![]()
e r étant très proche de 1 dans l'atmosphère, ceci conduit pour n à la décomposition
(2.4) n = n0 + n1
(2.5) ![]()
Le premier terme n0 correspond à la valeur moyenne (ou déterministe) du profil d'indice (elle est, par exemple, issue de mesures ou de modèles de prévision météorologiques) et est lié aux phénomènes atmosphériques de taille très supérieure à la longueur d'onde radar.
Le terme n1 sera considéré comme un processus aléatoire dont les caractéristiques statistiques seront obtenues, soit à partir de mesures de structure, donnant l'information sur la turbulence, soit par des modèles de spectres de turbulence (gaussien, Kolmogorov, K-G) et des modèles de ![]() (Van Zandt, Gossard, PIRAM...).
(Van Zandt, Gossard, PIRAM...).
On supposera de plus que la source est constituée d’un dipôle électrique vertical, situé au point S et de pulsation constante w
. Cette dernière hypothèse implique comme ci-dessus pour les champs ![]() et
et ![]() une dépendance temporelle en e iw
t . De plus les champs sont à symétrie sphérique et ne subissent pas de dépolarisation pendant la propagation : leurs composantes sont donc indépendantes de l’azimut j
, et l’onde reste polarisée verticalement. En repère sphérique (r, q
, j
) d’origine O au centre de la terre on obtient ainsi :
une dépendance temporelle en e iw
t . De plus les champs sont à symétrie sphérique et ne subissent pas de dépolarisation pendant la propagation : leurs composantes sont donc indépendantes de l’azimut j
, et l’onde reste polarisée verticalement. En repère sphérique (r, q
, j
) d’origine O au centre de la terre on obtient ainsi :
![]()
![]()
Notons que, pour des fonctions d’antenne complexes, on peut toujours considérer le champ comme rayonné d’un réseau de dipôles électriques verticaux.
Les calculs sont alors développés sur la seule composante Hj pour obtenir :
(2.6) avec
avec ![]() ,
,
analogue de l’équation d’Helmholtz (1.6)
Ces deux problèmes de propagation, sonar horizontal ou radar horizontal en basse stra-tosphère, présente des traits communs évidents :
(i) même type d’équation aux dérivées partielles dans le modèle
(ii) direction privilégiée de propagation : les rayons ne sont pas trop obliques par rapport à l’horizontale.
(iii) milieu lentement variable : l’indice n peut être considéré comme constant sur une longueur d’onde, c’est à dire que la longueur de corrélation des fluctuations de l’indice est beaucoup plus grande que la longueur d’onde,
(iv) milieu faiblement fluctuant : le milieu de propagation est hétérogène, mais les fluctuations d’indice sont faibles par rapport à leur valeur moyenne.
(v) on s’intéresse uniquement au champ lointain (k0 r > > 1)
Les propriétés (ii) (iii) (iv) (v) vont permettre des simplifications importantes dans l’équation (i).
On écrira d’autre part, l’inconnue initiale (champ acoustique ou champ électromagnétique) sous forme du produit d’un champ en espace libre par une fonction "enveloppe" dont les variations en fonction de la distance seront plus lentes (donc plus faciles à évaluer). Ainsi on travaillera en réalité sur une équation relative à l'enveloppe. C'est sur cette approche qu'est basé le modèle parabolique classique dit "petit angle" introduit par Fock [4] en 1946 pour l'étude de la diffraction d'une onde électromagnétique par un objet convexe de rayon de courbure très supérieur à la longueur d'onde ; modèle adapté à l'acoustique sous-marine par F. Tappert [5] en 1977. Depuis, ces mêmes hypothèses alliées à des techniques mathématiques plus sophistiquées (factorisation d'opérateurs pseudo-différentiels), ont permis le développement et la mise en œuvre de modèles paraboliques dits "grands angles" permettant la prise en compte de directions de propagation de plus grande inclinaison par rapport à la direction de référence. Ces améliorations sont, bien sûr, essentielles en pratique pour l'utilisation opérationnelle des modèles. Mais l'exposé qui suit sera volontairement limité au "modèle parabolique standard" petit angle.
L'équation de départ qui modélise la propagation en dehors de la source est l'équation :
(1.6) ![]()
La géométrie du guide d'onde océanique conduit à se placer en repère cylindrique d'origine située à la surface océanique (supposée plane ici) et à la verticale de la source. L'axe Or est ainsi horizontal, q désigne l’azimut, et l'axe Oz, vertical, dirigé vers le bas, porte la source à l'immersion ![]() . Dans ce repère, rappelons que :
. Dans ce repère, rappelons que :
![]()
et que les ondes planes harmoniques divergentes, solutions de l'équation des ondes (1.1) en dehors de la source, sont, sous des conditions de décroissance convenable à l'infini, de la forme
![]()
où ![]() désigne la fonction de Hankel d’ordre 0 et d’indice 1.
désigne la fonction de Hankel d’ordre 0 et d’indice 1.
Le vecteur d'onde ![]() est relié à la pulsation w
de la source par la relation de dispersion :
est relié à la pulsation w
de la source par la relation de dispersion :
![]()
Notons que l'angle j entre le vecteur d'onde et la direction horizontale est donné par
![]()
et supposé petit pour l'approximation paraxiale.
De plus, à grande distance de la source (k0r > > 1) on dispose du développement asymptotique
Il est donc naturel de remplacer le calcul du champ acoustique p solution de (1.6) par celui d'une enveloppe u, qui lui est liée par la relation
(1.7) 
Les oscillations principales en r de la pression seront ainsi éliminées de u ; et l'on retrouvera simplement les pertes TL par propagation, à partir de la solution u calculée : pour une pression de référence normalisée, elles seront données en dB par :
(1.8)![]()
Les hypothèses (ii), (iii), (iv), (v), permettent alors d'établir pour u l'équation aux dérivées partielles dite " modèle parabolique standard " :
(1.8)
C'est à partir de cette équation qu'ont été obtenus les différents résultats présentés plus bas.
L'équation de départ, qui modélise la propagation en dehors de la source, est :
(2.6)
La géométrie du guide d'onde formé par la basse troposphère a conduit ici à se placer en repère sphérique, d'origine le centre de la terre. La source sera supposée posée sur la terre, la direction OS, donnant la verticale du repère ; a désigne le rayon de la terre.
Figure 1 : Repère sphérique utilisé en propagation radar
Rappelons que deux hypothèses avaient conduit au modèle bidimensionnel (2.2) : symétrie azimutale, et source dipolaire verticale. Comme ci-dessus, nous cherchons à remplacer le calcul du champ Hj
par celui d'une enveloppe moins oscillante en distance. En repère sphérique, les ondes planes seront de la forme ![]() où R désigne la distance de la source au point considéré et k la norme du vecteur onde (horizontal pour la source choisie). Pour les altitudes faibles (r-a petit) R peut être approximé par aq
; d'autre part on simplifie beaucoup les calculs en prenant comme définition de l'enveloppe U
où R désigne la distance de la source au point considéré et k la norme du vecteur onde (horizontal pour la source choisie). Pour les altitudes faibles (r-a petit) R peut être approximé par aq
; d'autre part on simplifie beaucoup les calculs en prenant comme définition de l'enveloppe U
(2.7) ![]()
c'est à dire en factorisant non pas par ![]() mais par
mais par ![]() .
.
Les oscillations principales en distance du champ électromagnétique seront ainsi éliminées dans U. Le facteur de propagation F, directement exploitable pour les représentations de couverture radar, s’exprime en dB par la relation :
(2.8) ![]()
Les hypothèses (ii), (iii), (iv), (v), conduisent alors pour U à l'équation aux dérivées partielles suivantes dite " modèle parabolique petit angle ". On a posé
s = aq
et défini l'indice modifié
![]()
(2.9) ![]()
qui est tout à fait analogue à (1.9) : pour ce problème s désigne bien la distance "horizontale" (parallèle à la surface de la terre), comme r pour le problème d'acoustique sous-marine ; la variable r de la propagation électromagnétique est par contre l'altitude, comme z désignait la profondeur en milieu marin. L'hypothèse de symétrie azimutale explique ici la non apparition du terme lié à l’azimut (qui était en q dans (1.6) ). Mais, comme il a été dit plus haut, la levée de cette hypothèse remet fondamentalement en cause tout le processus de modélisation, et il n'existe pas actuellement, à notre connaissance, de modèle parabolique tridimensionnel pour la propagation électromagnétique.
Pour pouvoir résoudre le problème (1.9) ou (2.9), il faut imposer des "conditions aux limites" aux bords du guide d'onde. Ces conditions aux limites sont bien sûr issues de la physique : par exemple, pression acoustique nulle à la surface de la mer, condition d'impédance de Leontovich sur le champ magnétique à la surface de la terre. Le fond de l'océan (couches sédimentaires de caractéristiques et géométries variables) et la limitation du milieu de propagation (a priori illimité) pour le cas du radar, posent en termes de conditions aux limites de nombreux problèmes délicats que nous ne détaillerons pas ici. Notons cependant qu'une fois déterminées les conditions physiques, elles devront à leur tour être "parabolisées" avant d'être incluses dans le modèle.
En ce qui concerne la modélisation de la source, le modèle étant, rappelons-le, valable à grande (devant la longueur d'onde) distance de la source, diverses techniques permettent de créer des sources fictives analytiques représentant l'effet de la source réelle à quelque distance de son point de localisation.
Rappelons également que l'ouverture en site de la source doit être en accord avec la limitation angulaire imposée par le modèle parabolique (c'est à dire consistante avec l'approximation paraxiale effectuée).
Cet exemple traite de la propagation en présence d'un plan incliné et est extrait de [2] et de [25].
On considère un milieu océanique constitué de deux couches fluides homogènes, une couche d'eau de densité r
0 = 1 g/cm3 et de célérité c0 = 1500 m/s, et une couche sédimentaire de densité r
1 = 1.5 g/cm3, de célérité c1 = 1700 m/s, et d'atténuation a
1 = 0.5 dB/l
. La paramétrisation de la surface S
1 décrivant l'interface eau/sédiment (cf. Figure 2 et Figure 3) est donnée par ![]() où x = r cos q
et y = r sin q
et où Z1 (x; y) vérifie
où x = r cos q
et y = r sin q
et où Z1 (x; y) vérifie
Une source ponctuelle S, émettant à la fréquence f = 25Hz, est placée en r = 0 à une profondeur zS = 90m. La profondeur du guide d'onde au niveau de la source est de 200m. Nous nous intéressons à la propagation à longue distance. Seuls les modes propagatifs, Y m(z), m = 1,2,3, sont alors retenus pour notre analyse.

Figure 2 : Description de l'interface eau/sédiment (coupe verticale à
q = 0°)
Figure 3 : Description de l'interface eau/sédiment (vue 3D)
Chaque mode propagatif est ainsi utilisé comme condition initiale au modèle parabolique 3D. L'initialisation est indépendante de l'azimut. Le champ est propagé jusqu'à une distance maximale rmax = 24km.
Sur les Figure 6, Figure 5 et Figure 6, nous représentons en coupe horizontale à la profondeur z = 36m, le champ de pertes par propagation relatif à chacun des modes 1, 2, 3. Pour chacun des trois cas figurent, outre le champ issu du calcul 3D effectué avec notre code de calcul TRIPARADIM, le champ obtenu avec le modèle Nx2D, modification du modèle 3D TRIPARADIM permettant de remplacer le calcul 3D par N calculs 2D en N azimuts différents. On a pour cela supprimé les termes de couplage suivant la direction azimutale, ce qui, bien sûr, allège considérablement les calculs. Les calculs 3D ont nécessité les pas de calcul : D r = 10m, D z = 2m, et D q = 0.031deg, i.e., 11520 points en azimut. A un tel échantillonnage en azimut correspond une longueur d'arc voisine del /2 à la distance de propagation maximale rmax, où l désigne la longueur d'onde acoustique (l = 60 m).
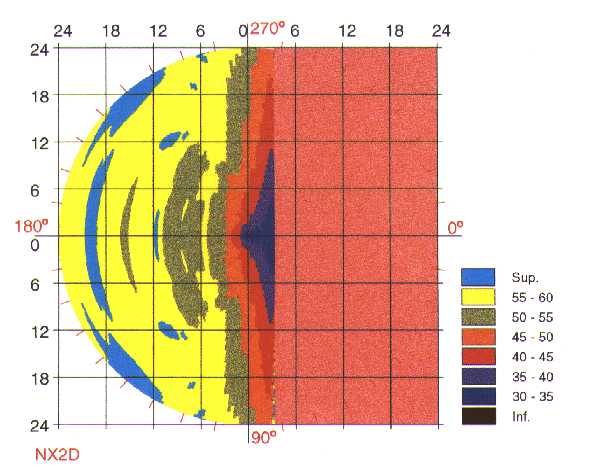

Figure 4 : Champ de pertes par propagation. Source modale mode 1. Coupe à z = 36m. A gauche, calcul Nx2D ; à droite, calcul 3D
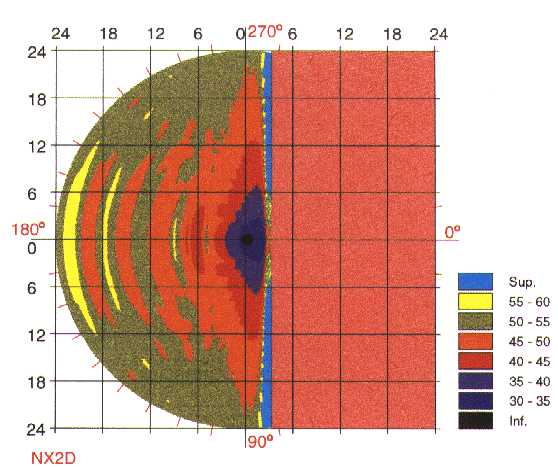
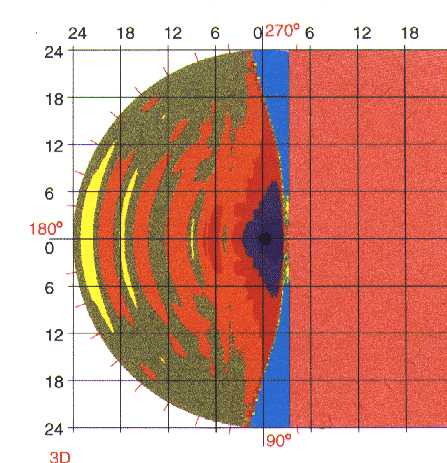
Figure 5 : Champ de pertes par propagation. Source modale mode 2. Coupe à z = 36m. A gauche, calcul Nx2D ; à droite, calcul 3D
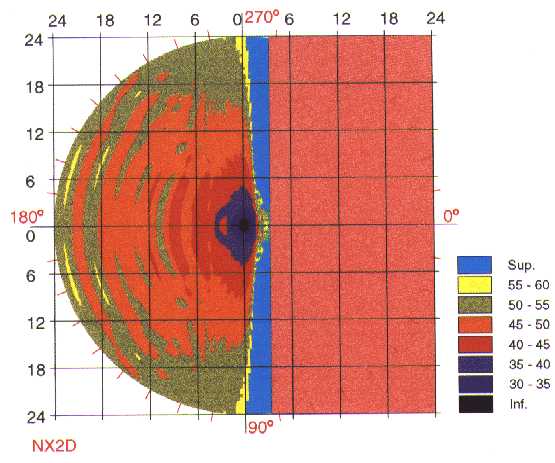
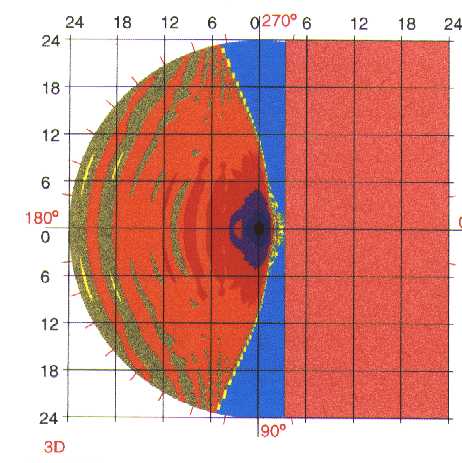
Figure 6 : Champ de pertes par propagation. Source modale mode 3. Coupe à z = 36m. A gauche, calcul Nx2D ; à droite, calcul 3D
Le calcul des solutions Nx2D a nécessité seulement 360 points en azimut. Une analyse de convergence de la solution discrète a montré qu'il peut être dangereux pour une bonne interprétation des résultats d'effectuer un calcul 3D avec un pas en azimut plus grossier.
Nous pouvons observer une déviation relativement importante de l'énergie lors de sa propagation en travers de la pente, i.e., au voisinage des angles en azimut q = 90deg et q = 270deg. Comme nous l'avons indiqué, un modèle Nx2D, ne prenant nullement en compte les termes de couplage suivant la direction azimutale, ne peut restituer cette déviation. Cet effet est ainsi typiquement un effet 3D. Le phénomène de réfraction horizontale observé, plus marqué pour le mode 3 que pour les modes 1 et 2, conduit à la création de zones d'ombre. Si on s'intéresse particulièrement à la direction (Oy), i.e., q = 90deg, cette zone d'ombre apparaît en effet à la distance r » 12 km pour le mode 3 et à la distance r » 16km pour le mode 2. Pour le mode 1, les calculs ayant été effectués jusqu'à rmax = 24km ne permettent pas de mettre en évidence cette zone d'ombre dans la direction q = 90deg. Elle est néanmoins présente dans les directions voisines. Nous remarquons aussi que les solutions Nx2D et 3D sont similaires pour des angles voisins de q = 0deg et de q = 180deg.
L'analyse modale précédente nous a permis de localiser les divers effets 3D et d'en expliquer la nature.
Nous considérons maintenant une source ponctuelle (source omnidirectionnelle obtenue en sommant les trois modes propagatifs). Nous représentons sur la Figure 7 une coupe verticale du champ de pertes par propagation obtenue par un calcul 3D. Une coupe à immersion fixe z = 36 m est représentée sur la Figure 8. L’analogue Nx2D est aussi représenté. Cette coupe est effectuée suivant l'angle en azimut q
= 90 deg pour lequel la pente de l'interface eau/sédiment est nulle, et ![]() . Un calcul Nx2D prédit un schéma d'interférences conséquent aux trois modes propagatifs, et ce pour r variant de 0 à rmax. En revanche, un calcul 3D prédit d'une part, la présence des trois modes propagatifs jusqu'à une distance voisine de r = 12km, distance à partir de laquelle l'énergie liée au mode 3 est déviée horizontalement, d'autre part un schéma d'interférences lié aux deux modes propagatifs restants (mode 1 et mode 2) pour r compris entre r »
12km et r »
16km, et enfin la présence d'un seul mode propagatif pour r ³
16km. Les franges d'interférences observées pour r ³
20km sont directement liés au phénomène d'interférence du mode 1 avec lui-même.
. Un calcul Nx2D prédit un schéma d'interférences conséquent aux trois modes propagatifs, et ce pour r variant de 0 à rmax. En revanche, un calcul 3D prédit d'une part, la présence des trois modes propagatifs jusqu'à une distance voisine de r = 12km, distance à partir de laquelle l'énergie liée au mode 3 est déviée horizontalement, d'autre part un schéma d'interférences lié aux deux modes propagatifs restants (mode 1 et mode 2) pour r compris entre r »
12km et r »
16km, et enfin la présence d'un seul mode propagatif pour r ³
16km. Les franges d'interférences observées pour r ³
20km sont directement liés au phénomène d'interférence du mode 1 avec lui-même.
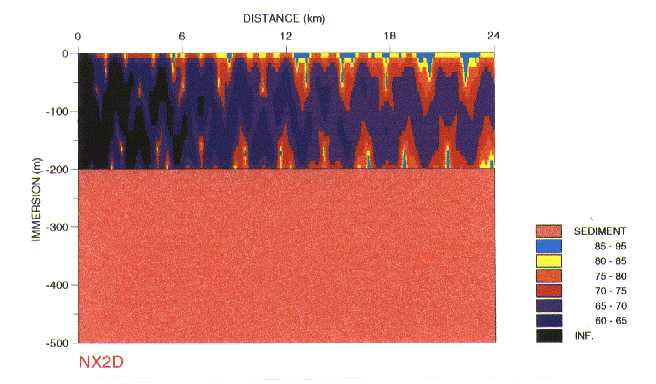
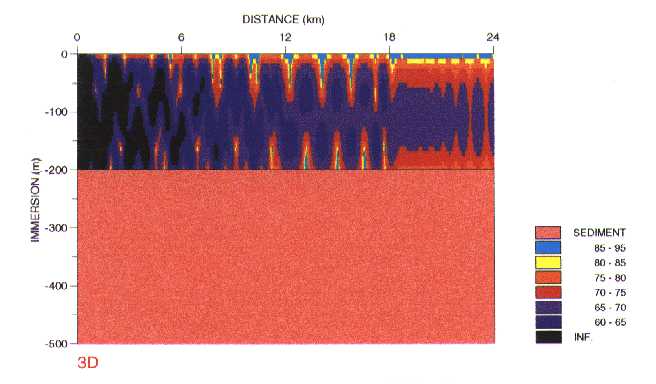
Figure 7 : Champ de pertes par propagation. Source ponctuelle. Coupe à
q = 90°. En haut, calcul Nx2D ; en bas calcul 3D.
Figure 8 : Evolution des pertes par propagation en fonction de la distance à
q = 90° à z = 36 m. Source ponctuelle. En trait plein, calcul 3D ; en pointillé, Calcul Nx2D.L'exemple considéré correspond à un problème de propagation par petit fond et à très basse fréquence. Les résultats font apparaître des phénomènes typiquement 3D non prédits par les modèles Nx2D. Nous insistons sur le fait que dans l'exemple présenté (mais, bien sûr, d'autres cas ont été traités avec une conclusion analogue) la géométrie des fonds sous-marins est faiblement variable (pente maximale de 2.86 degrés) et conduit cependant à une déviation horizontale du champ sonore non négligeable (écart largement supérieurs à 6 dB).
On s'accorde à penser que le milieu océanique est le siège de six phénomènes océaniques essentiels affectant tous l'amplitude et la phase du champ sonore s'y propageant :
Les deux premiers phénomènes sont généralement pris en compte par des modèles déterministes. Les autres phénomènes présentent des caractéristiques spatio-temporelles plus petites et peuvent être représentés de manière appropriée par des processus stochastiques. Il est généralement reconnu que le phénomène dominant dans les fluctuations de petites échelles est celui dû aux ondes internes, notamment en émission basse fréquence. Notons qu'il est possible, à partir de relevés de sondes thermiques obtenus lors de mesures in-situ, de séparer les ondes internes des autres mécanismes constitutifs, et de s'assurer, en utilisant par exemple la théorie de Garrett et Munk, qu'elles représentent ou non le mécanisme perturbateur correspondant. Ceci nous amène à considérer que la composante fluctuante de la célérité d C [cf Eq. (1.3) ] est due essentiellement aux perturbations aléatoires de petite échelle dues aux ondes internes.
Pour représenter les ondes internes, il s'agit donc de caractériser statistiquement les fluctuations aléatoires de célérité absolues d C(r, z) ou relatives e (r, z)
(1.4) ![]()
(1.5) ![]()
La modélisation mathématique de ces phénomènes océaniques permet de réduire la connaissance de ces processus aléatoires à quelques paramètres statistiques caractéristiques : valeur moyenne < e (r, z) > , moyenne quadratique < e 2(r, z) > , longueurs de corrélation horizontale et verticale, période temporelle du phénomène... qui s'intègrent ensuite facilement dans les modèles de propagation. Nous avons construit un générateur numérique de fluctuations de célérité ; celles-ci sont engendrées à partir des spectres :
L'hypothèse d'une fonction de corrélation delta-corrélée des fluctuations de célérité a été retenue pour l'étude théorique (après confrontation avec des mesures expérimentales) . L’équation aux dérivées partielles stochastique à résoudre est :
(1.10)![]() Deux approches sont alors possibles pour calculer les moments de u :
Deux approches sont alors possibles pour calculer les moments de u :
L'obtention des équations aux moments fait appel à des outils sophistiqués de calcul différentiel et calcul intégral stochastiques. L'étude est présentée dans l'hypothèse (réaliste au vu des données expérimentales) où la fluctuation relative de célérité e (r, z) est considérée comme un processus aléatoire centré, gaussien, spatialement homogène et delta-corrélé dans la direction de propagation ; c'est à dire que sa fonction de corrélation s'écrit sous la forme :
![]()
avec
d distribution de Dirac
Lh et Lv : longueurs de corrélation horizontale et verticale des fluctuations de célérité
![]()
On montre par exemple que l'équation déterministe régissant le moment d'ordre 1 < u > (moyenne de u) est :
(1.11) c'est-à-dire qu'il suffit, pour calculer <
u >
, d'apporter une modification mineure au code de calcul déterministe qui permet la résolution de (1.10) avec e
= 0. Remarquons en outre que, in fine, dans ce modèle, les ondes internes se conduisent comme un amortissement variable en z proportionnel à
c'est-à-dire qu'il suffit, pour calculer <
u >
, d'apporter une modification mineure au code de calcul déterministe qui permet la résolution de (1.10) avec e
= 0. Remarquons en outre que, in fine, dans ce modèle, les ondes internes se conduisent comme un amortissement variable en z proportionnel à
![]()
Par cette approche stochastique, un seul calcul de propagation acoustique (au lieu des 150 évoqués ci-dessus) permettra l'obtention de la moyenne de u.
Remarque : on peut également obtenir les équations aux dérivées partielles régissant les moments de tous ordres. En particulier, les moments d'ordre 2 permettent d'accéder à l'intensité du champ sonore, et les moments d'ordre 4 à la variance de cette intensité, grandeurs qui intéressent les opérationnels. Mais, bien sûr, il faut pour les résoudre réécrire de nouveaux codes numériques adaptés aux nouvelles équations aux dérivées partielles obtenues.
Les résultats présentés ci-après sont extraits de [1].
La figure Figure 9 représente le champ sonore en milieu déterministe obtenu en résolvant (1.10) avec e = 0.
Figure 9 : Champ sonore en milieu déterministe.
Figure 10 : Champ sonore en milieu aléatoire. Approche statistique
Les calculs ont été effectués avec la configuration suivante :
Figure 11 : Profil de célérité
La Figure 10 montre le champ sonore moyen (moment d’ordre 1) obtenu par l’approche statistique. Pour cela nous avons généré 150 profils de célérité fluctuant autour du profil déterministe de la Figure 11 et nous avons résolu (1.10) 150 fois.
La Figure 12 représente les différences entre le champ sonore déterministe et le moment d’ordre 1. Elle donne l’erreur moyenne commise lors de la modélisation lorsque l’on ne prend pas en compte les fluctuations du milieu marin.
Figure 12 : Différence des champs sonores déterministe et statistique
Ces erreurs atteignent 5 dB au bout de 100 km comme le montrent les coupes des champs sonores déterministe et aléatoire en fonction de la distance de propagation (à l’immersion 100 m) présentées sur la Figure 13.
Figure 13 : Différence des champs sonores déterministe (en rouge) et statistique (en vert) pour Z = 100 m
L’approche stochastique consiste elle à résoudre une seule fois l’équation (1.11). Les résultats sont présentés sur la Figure 14 :
Figure 14 : Différence des champs sonores déterministe et stochastique
Ces résultats sont très similaires à ceux obtenus par l’approche statistique ce qui montre la cohérence des deux approches
Dans ces deux cas l’amplitude des fluctuations a été supposée constante en fonction de l’immersion (e = 5 10-4). On retrouve, au travers des " bandes " verticales de couleurs le fait que les ondes internes se conduisent comme un amortissement (constant en fonction de l’immersion) au cours de la propagation.
Le cas de la Figure 15 correspond à une décroissance, plus réaliste, de l’amplitude des fluctuations en fonction de l’immersion ( de e = 5 10-4 en surface à e = 1 10-4au fond).
Figure 15 : Différence des champs sonores déterministe et statistique
Enfin les figures suivantes : Figure 16, Figure 17, et Figure 18 présentent des résultats relatifs au moment d’ordre deux (intensité sonore moyenne) obtenus en résolvant une équation similaire à l’Eq (1.11) pour le moment d’ordre deux.
Figure 16 : Intensité sonore en milieu déterministe.
Figure 17 : Intensité sonore en milieu aléatoire. Approche statistique
Figure 18 : Différence des intensités sonores déterministe et statistique
Les résultats théoriques ont été partiellement validés par comparaison avec les données expérimentales prélevées lors de la campagne " Resolute Support 85 " réalisée au large des îles Britanniques. Le rapport océanographique associé à cette campagne faisait état d’une zone de perturbation liée à la proximité du talus continental, zone propice à la formation d’ondes interne. Le suivi temporel des mesures de niveau sonore met en évidence des fluctuations d’ordre de grandeur comparable aux fluctuations théoriques obtenues, pouvant atteindre 8 dB.
L’approche stochastique développée permet en un seul calcul d’obtenir en milieu aléatoire le comportement de l’énergie sonore reçue sur un capteur. Elle renseigne les opérationnels sur le niveau sonore moyen reçu par leurs systèmes. Ces études doivent être poursuivies afin de fournir l’écart type de l’intensité, c’est-à-dire le moment d’ordre 4 qui caractérise les fluctuations de niveau sonore.
Nous ne considérons pas les phénomènes atmosphériques intervenant au delà de la tropopause, notre application radar (radar de veille avec des angles rasants) se limitant aux premiers 5 kilomètres d'altitude.
Les principales variations du profil d'indice de réfraction ont leur origine dans les mouvements grande échelle des masses d'air atmosphérique, et sont relativement stables temporellement. Leur hauteur caractéristique va de quelques dizaines de mètres pour les conduits d'évaporation, à quelques centaines de mètres pour les forts conduits d'altitude ou de surface. Leur homogénéité horizontale dépend des masses d'air concernées, mais même en cas de variations "brusques" de la météo (front météorologique) ou du terrain (côte) la transition d'un profil à l'autre se fait sur des distances de quelques kilomètres, voire quelques dizaines de kilomètres. Ces mouvements grande échelle sont donc, en général, pris en compte dans des modèles déterministes.
D'autres phénomènes ont des caractéristiques spatio-temporelles plus petites et pourront de manière appropriée être représentés par des processus stochastiques. Nous avons établi que les phénomènes fine échelle dominants provenaient de 3 sources : turbulence atmosphérique, rugosité de surface, et présence de feuillets atmosphériques. S'il existe déjà des modèles de feuillet utilisés dans des domaines touchants aux télécommunications, ou à la télédétection du milieu, rien à notre connaissance n'existe à ce jour dans le domaine de la propagation. Nous avons travaillé sur l'influence de la rugosité de surface et celle de la turbulence atmosphérique. C'est sur ce dernier point que nous centrerons cette étude. L'influence de la turbulence est connue pour apparaître à des fréquences supérieures à 10 GHz environ. Cependant les effets de la turbulence en terme d'écho radar parasite (rétrodiffusion) ne seront pas les plus gênants, les échos de mer ou clutter, restant prédominant à nos angles de site. Par contre, pour ces mêmes angles de propagation, la turbulence est responsable d'une forte diffusion avant, pouvant entraîner des fluctuations non négligeables du front d'onde (et donc un affaiblissement ou des scintillations d'un écho de cible radar). De plus, lorsque la fréquence diminue, la contribution des composantes anisotropes du champ turbulent augmente.
Nous considérons donc que la composante fluctuante de l'indice n1 (cf. (2.5) ) est due essentiellement aux perturbations aléatoires de petite échelle générées par la turbulence, à la fois en couche limite de surface océanique (CLSO) et en atmosphère libre, entre la couche limite et la tropopause. Comme pour la cas du sonar, il s'agit donc de caractériser statistiquement les fluctuations aléatoires n1 de l'indice de réfraction, puis de résoudre l'équation aux dérivées partielles stochastique analogue à (1.10) :
(2.10)![]() avec
avec ![]()
Le processus aléatoire n1 sera construit à partir de spectres de turbulence. Nous avons critiqué la pertinence de l'utilisation des spectres classiques de turbulence (gaussien ou Kolmogorov) dans notre configuration de radars ; en effet l'hypothèse de milieu turbulent homogène et isotrope (ou localement) qui les sous-tend n'est pas réaliste pour les fréquences radars et les angles d'incidence utilisés dans les problèmes de veille ; l'influence des composantes turbulentes fortement anisotropes ne peut alors pas être négligée. Nous proposons donc un nouveau spectre bidimensionnel possédant une longueur de corrélation horizontale Lh supérieure à la longueur de corrélation verticale, le spectre K-G : pour la composante verticale de la turbulence, ce spectre préserve la dépendance en k-11/3 de la théorie de Kolmogorov ; par contre, en horizontal, est privilégiée l'hypothèse d'une fonction de corrélation gaussienne (ou Dirac). Pour préciser entièrement le spectre, il est nécessaire en outre de déterminer la constante de structure ![]() qui représente les variations de l'intensité de turbulence dans l'espace et dans le temps. Nous avons passé en revue les modèles de
qui représente les variations de l'intensité de turbulence dans l'espace et dans le temps. Nous avons passé en revue les modèles de ![]() de Van Zandt (estimation à partir de données réelles et "instantanées", issues de radio sondages), de Gossard (modèle analytique) et le modèle PIRAM de la DCE/CELAR (estimation dans la Couche Limite de Surface Océanique (CLSO) à partir de mesures météorologiques simples).
de Van Zandt (estimation à partir de données réelles et "instantanées", issues de radio sondages), de Gossard (modèle analytique) et le modèle PIRAM de la DCE/CELAR (estimation dans la Couche Limite de Surface Océanique (CLSO) à partir de mesures météorologiques simples).
Comme dans le cas du sonar, ont été confrontées une approche statistique (simple mais coûteuse car basée sur la méthode de Monte-Carlo) et une approche stochastique qui, après un travail mathématique fouillé, construit directement les équations aux dérivées partielles déterministes relatives aux moments de U et remplace donc le grand nombre de calculs requis par la méthode de Monte-Carlo par un seul.
Le même type d'hypothèses est fait sur le proces-sus aléatoire n1 : centré, gaussien, spatialement homogène et delta-corrélé dans la direction de propagation ; et conduit, par exemple, pour le premier moment à l'équation (déterministe) régis-sant la moyenne de U < U > , analogue à (1.11) :
(2.11) 
Ici la fonction d'autocorrélation gaussienne de longueur de corrélation Lh des fluctuations horizontales d'indice dans le spectre K-G a été approchée par une mesure de Dirac convenable, et on a donc posé :
![]()
d distribution de Dirac.
A fonction d'autocorrélation des fluctuations verticales de l'indice. Notons qu’aucune hypothèse n'est nécessaire a priori sur la forme de A. Pour le choix du spectre de Kolmogorov dans la direction verticale, la caractérisation de A est relativement complexe, mais nous avons montré que :
![]()
avec L0v échelle externe de la turbulence selon la verticale. Là encore, l'effet de la turbulence sur la propagation est un amortissement proportionnel à A (0,r)
On pourrait de même écrire les équations relatives aux moments d'ordre supérieur (par exemple, autocorrélation du champ électromagnétique et puissance moyenne intéressent plus directement les opérationnels) et développer les codes de calcul numérique correspondant.
Notons enfin que certains aspects de cette étude ont pu être validés au moyen de mesures, mais les jeux de données couplant enregistrements météo et électromagnétiques longues distances indispen-sables aux comparaisons simulations numériques-mesures sont très rares.
La méthode précédente est appliquée au cas d’une propagation guidée en présence d'un fort conduit d'évaporation de 40 m.
Le système radar fonctionne à 20 GHz (l = 1,5 cm), l'antenne est située à 15 m et possède une demi-ouverture de 0,5°. La polarisation est verticale. Le profil moyen d'indice dans le conduit d'évaporation est fourni par le modèle simple de Battaglia, représenté Figure 19. Au delà, la météo possède un profil standard.

Figure 19 : Conduit d’évaporation de 40m (modèle de profil de Battaglia)
Le modèle de ![]() utilisé pour la simulation de la turbulence est le modèle de Gossard pour lequel il suffit de préciser la hauteur de conduit.
utilisé pour la simulation de la turbulence est le modèle de Gossard pour lequel il suffit de préciser la hauteur de conduit.
La Figure 20 représente la couverture radar obtenue en milieu non turbulent, avec le profil déterministe de Battaglia (atténuation du champ par rapport au champ initial). On observe le guidage de l'onde, ce type de conduit provoquant de forts effets de propagation guidée à ces fréquences élevées, lorsque la hauteur d'antenne est inférieure à la hauteur de conduit. Comme il a été dit dans la présentation du modèle parabolique, la solution retient bien tous les effets de couplage entre modes, sous la forme de zones d'interférences dans le conduit lui-même.
Le résultat de la méthode stochastique est donné sur la Figure 21, au milieu : ce graphique représente en fait la différence de niveaux de dB entre les couvertures en milieu turbulent et non-turbulent ("milieu déterministe"). La turbulence a été paramétrée par une échelle externe L0v de 10 m (tourbillons de petites tailles) ; le choix de la longueur de corrélation horizontale Lh ne devant pas mettre en défaut l'hypothèse de delta-corrélation en distance de la fonction d'autocorrélation, Lh ne doit en tout cas pas être supérieure au pas de discrétisation en distance : elle a été fixée égale au pas en distance du modèle. Sur l’exemple présenté, comme sur tous les autres exemples traités, ce choix a toujours assuré une excellente concordance entre les résultats issus des deux approches stochastique et statistique.
Nous constatons que la différence de niveaux peut atteindre la dizaine de dB, en particulier dans les zones de "silence" de la couverture (interférences destructives). Ceci correspond bien, au sens de la moyenne (moment d'ordre 1), à l'effet de diffusion du champ par la turbulence, qui tend à répartir l'énergie incidente dans toutes les directions.
La même grandeur est représentée sur la Figure 22, en bas, pour la méthode statistique, après 150 simulations. On peut observer la très bonne concordance entre les deux méthodes, l'approche stochastique ayant donc "coûté" 150 fois moins cher. Le choix du nombre de simulations est empirique : dans la pratique on a pu ainsi vérifier qu'un nombre inférieur à 100 n'est pas suffisant et provoque des fluctuations non physiques, comme celles visibles sur la Figure 22 au dessus du conduit, et qui disparaissent lorsqu'on augmente ce nombre.
Cet exemple numérique est réalisé à partir de modèles et profils théoriques, et permet essentiellement de réaliser que l’on dispose d’outils adaptés à une étude fine des interactions ondes-milieu. Un début de validation a été effectué, sur des mesures issues d’une campagne de mesures de SER réalisée par l’OTAN, à laquelle le CTSN participait, avec les conclusions suivantes : le modèle présente effectivement un comportement correct (ordre de grandeur et sensibilité aux paramètres), mais des écarts sont observés et poussent à incorporer au modèle les effets de la rugosité de surface, physiquement fortement couplée à la caractérisation de la turbulence dans la CLSO.
Figure 20 : Champ des pertes électromagnétiques à 20 GHz en milieu déterministe (non turbulent).
L’échelle de couleur va de –145 à -80 dB par pas de 5dB.

Figure 21 : Différence (de dB) entre la couverture radar en milieu déterministe , et la couverture radar en milieu turbulent obtenue par la méthode stochastique.
L’échelle va de 0 à 14dB et sup., par pas de 1dB.
Figure 22 : Différence (de dB) entre la couverture radar en milieu déterministe , et la couverture radar en milieu turbulent obtenue par une approche statistique, sur un ensemble de 150 simulations.
L’échelle va de 0 à 14dB et sup., par pas de 1dB.
Après avoir évoqué l’importance pour les applications sonar ou radar de la connaissance du milieu et de son influence sur la propagation et montré la profonde similitude entre les deux problèmes, nous avons pu unifier la démarche de modélisation. Nous nous sommes ainsi attachés à construire des modèles de propagation sonar ou radar dans des cas réalistes d’environnements variables. Les sorties de ces modèles ont été confrontées, dans la mesure du possible, à des mesures expérimentales. Par rapport aux prévisions des modèles classiques, nous avons pu mettre en évidence des écarts supérieurs à 6 dB dans les trois types d’exemples présentés : effets de diffraction horizontale en présence d’un fond sous-marin faiblement incliné ; influence des ondes internes sur la propagation acoustique ; influence de la turbulence sur la propagation radar. Ceci devrait permettre de progresser dans la reconnaissance des conditions d’environnement dans lesquelles les modèles " simples " risquent de donner des informations erronées. L’effort de modélisation, qui permet également une réduction sensible (de 150 à 1 dans les deux derniers cas) des temps de calculs nécessaires, allié aux progrès constants du matériel informatique, devrait déboucher, à moyen terme, sur l’utilisation opérationnelle de ces modèles de la deuxième génération, lorsque les circonstances l’exigent.
Nous avons également tenté, à travers cette étude, d'illustrer sur deux exemples (simples!) menés en parallèle, dans des domaines de la physique qui souvent s'ignorent, quelques unes des difficultés liées à la modélisation mathématique et à la simulation numérique de phénomènes complexes. Nous tenons à souligner que les modèles réalistes, de nos jours, ne peuvent être que le fait d'équipes interdisciplinaires : plusieurs phénomènes physiques sont couplés et la globalité du problème doit être comprise avant de pouvoir être modélisée, sous peine de voir le modèle négliger toutes leurs interactions. Les outils mathématiques sophistiqués jouent un rôle important dans la construction de modèles mais la complexité mathématique requise pour modéliser n’a pas nécessairement d’incidence sur la complexité du modèle obtenu. La construction de gros codes de calcul est tout un art en soi, et ne devrait pas être confiée à des "amateurs", même utilisateurs aguerris, si on en attend des qualités de robustesse, de précision, de modularité et de portabilité.
Enfin, notons que le modèle numérique le plus séduisant étant vide de substance sans confrontation et validation en présence de données expérimentales, l'acquisition de telles données reste un problème crucial. En effet, les campagnes de mesures ne prévoient que trop rarement l'acquisition simultanée de données relatives à plusieurs phénomènes physiques couplés.
[1] C. NOEL : Propagation des signaux sonores en milieu marin aléatoire. Thèse de doctorat de l’Université d'Aix-Marseille II. 1993.
[2] F. Sturm : Modélisation mathématique et numérique d’un problème de propagation en acoustique sous-marine : prise en compte d’un environnement variable tridimensionnel. Thèse de doctorat de l’Université de Toulon - Var. 1997.
[3] E. Mandine : Propagation électromagné-tique en milieu atmosphérique aléatoire : application au couplage entre un modèle de prévision météorologique et un modèle de couverture radar. Thèse de doctorat de l’Université de Toulon - Var. 1997.
[4] V.A. FOCK : Electromagnetic diffraction and propagation problems. Pergamon press, 1965.
[5] F.D. TAPPERT : Wave propagation and underwater acoustics. Chapitre 5. 1977 Springer-Verlag, Berlin Heidelberg, edited by J.B.Keller and J.S.Papadakis, NY.
[6] M.C. PELISSIER, B. KOOBUS : A 3-D ocean-acoustic parabolic propagation model in a variable environment. Proceedings of ACOUSTIC'93, Southampton (Grande Bretagne), avril 1993, p. 847-855.
[7] C. NOEL, M.C. PELISSIER, D. HABAULT : Mean intensity and vertical mutual coherence function of acoustic signal in a random medium : the ocean. Stochastic and statistical approaches. Proceedings of ACOUSTIC'93, Southampton (Grande Bretagne), avril 1993, p. 625-633.
[8] C. NOEL, M.C. PELISSIER : Comparaison entre simulations par méthode de Monte Carlo et par équation aux dérivées partielles stochastique sur un modèle de propagation. Actes du 25ème Congrès National d'Analyse Numérique, Giens (France), mai 1993, p. 185-186.
[9] C. NOEL, M.C. PELISSIER : First and Second Moments of Acoustic Signals in a Random Ocean. Proceedings of the 2nd International Conference on Mathematical and Numerical Aspects of WAVE PROPAGATION Delaware (USA), juin 1993, p. 173.
[10] M.C. PELISSIER : A Fourier spectral method for a parabolic propagation model in a representative ocean-acoustic environment. Proceedings of the 2nd International Conference on Mathematical and Numerical Aspects of WAVE PROPAGATION Delaware (USA), juin 1993, p. 154.
[11] C. NOEL, M.C. PELISSIER, D. HABAULT : Moments des signaux sonores en milieu marin aléatoire. Actes du 14ème Colloque GRETSI, Juan-les-Pins (France), septembre 1993.
[12] C. BERNARDI, M.C. PELISSIER : Spectral approximation of a Schrö dinger type equation. Mathematical Models and Methods in Applied Sciences, Vol. 4, n° 2, 1994
[13] F. Sturm, M.C. Pélissier, D. Fattaccioli : Development of an acoustic field predictor in a three dimensional oceanic environment, Full Field Inversion Methods In Ocean And Seismic Acoustics, A Nato Conference, Lerici, ITALY, 27 June - 1 July 1994.
[14] M.C. Pélissier, F. Sturm, D. Fattaccioli : Sound propagation modeling using a modified parabolic equation in a 3-D range dependent oceanic environment, 2nd European Conference on Underwater Acoustics, Copenhagen, DENMARK, 4-8 July 1994.
[15] E. Mandine, M.C. Pélissier : Construction d'un générateur de profils aléatoires - application à la propagation radar en milieu turbulent, 15ème colloque GRETSI, Juan Les Pins, Sept. 1995.
[16] F. Sturm, M.C. Pélissier, D. Fattaccioli : 3-D Sound Propagation Modelling with TRIPARADIM, 3rd European Conference on Underwater Acoustics, Heraklion, Crete, GREECE, 24-28 June 1996.
[17] E. Mandine, M.C. Pélissier : Direct stochastic treatment of electromagnetic propagation problems in random medium, using a P.E. model, Battlespace Atmospheric Conference 1996, San Diego,CA,USA, December 1996.
[18] F. Sturm, M.C. Pélissier : Propagation sonore tridimensionnelle en acoustique sous-marine : simulation numérique avec TRIPARADIM, 4ème Congrès Français d'Acoustique, Marseille, FRANCE, 14-18 avril 1997.
[19] F. Sturm, M.C. Pélissier : 3D Numerical Simulations with TRIPARADIM : Application to Benchmark Problems in Underwater Acoustics, Third International Conference on Theoretical & Computational Acoustics, Columbia University, New York, USA, July 14-18 1997.
[20] E. Mandine, M.C. Pelissier : Generation of the response statistics for electromagnetic propagation problems in a random range-dependent medium : a direct stochastic approach, Progress In Electromagnetics Research Symposium PIERS 97, Cambridge,MA,USA,Juillet 97
[21] F. STURM, M.C. PELISSIER : Numerical simulations with TRIPARADIM : Application to Benchmark Problems in Underwater Acoustics. Third International Conference on Theoretical & Computational Acoustics, Columbia University, New York, USA, Juillet 1997
[22] F.B. STURM, J.A. FAWCETT : 3D-varying bathymetry effects on sound propagation in ocean acoustics, numerical simulation using 3D parabolic models. Memorandum Saclantcen, 1997.
[23] F.B. STURM, J.A. FAWCETT, F.B. JENSEN, M.C. PELISSIER : Benchmarking two three dimensional parabolic equation methods. 16th International Congress on Acoustics, Seattle, USA, Juin 1998.
[24] C. NOEL, C. VIALA, Y. STEPHAN : A study of hybrid and chaotic mid-range propagation in a double sound channel environment. Soumis au Journal of Oceanic Engineering en Juin 1998
[25] F. STURM : Mise en évidence et analyse d’effets tridimensionnels par utilisation et confrontation de modèles paraboliques 3D. 4èmes journées d’études : Acoustique sous-marine, Brest, Nov 98.
[26] P. HOUBAUX : Modélisation et simulation numérique du couplage géo-acoustique en propagation océanique basses fréquences. Thèse de doctorat de l’Université de Toulon et du Var. (en cours).
[27] E. MANDINE : Rapport final de dépouillement des données météo de Livourne 96, CTSN/LAS, 31/07/98.
Figure 1 : Repère sphérique utilisé en propagation radar
*Figure 2 : Description de l'interface eau/sédiment (coupe verticale à
q = 0°) *Figure 3 : Description de l'interface eau/sédiment (vue 3D)
*Figure 4 : Champ de pertes par propagation. Source modale mode 1. Coupe à z = 36m. A gauche, calcul Nx2D ; à droite, calcul 3D
*Figure 5 : Champ de pertes par propagation. Source modale mode 2. Coupe à z = 36m. A gauche, calcul Nx2D ; à droite, calcul 3D
*Figure 6 : Champ de pertes par propagation. Source modale mode 3. Coupe à z = 36m. A gauche, calcul Nx2D ; à droite, calcul 3D
*Figure 7 : Champ de pertes par propagation. Source ponctuelle. Coupe à
q = 90°. En haut, calcul Nx2D ; en bas calcul 3D. *Figure 8 : Evolution des pertes par propagation en fonction de la distance à
q = 90° à z = 36 m. Source ponctuelle. En trait plein, calcul 3D ; en pointillé, Calcul Nx2D. *Figure 9 : Champ sonore en milieu déterministe.
*Figure 10 : Champ sonore en milieu aléatoire. Approche statistique
*Figure 11 : Profil de célérité
*Figure 12 : Différence des champs sonores déterministe et statistique
*Figure 13 : Différence des champs sonores déterministe (en rouge) et statistique (en vert) pour Z = 100 m
*Figure 14 : Différence des champs sonores déterministe et stochastique
*Figure 15 : Différence des champs sonores déterministe et statistique
*Figure 16 : Intensité sonore en milieu déterministe.
*Figure 17 : Intensité sonore en milieu aléatoire. Approche statistique
*Figure 18 : Différence des intensités sonores déterministe et statistique
*Figure 19 : Conduit d’évaporation de 40m (modèle de profil de Battaglia)
*Figure 20 : Champ des pertes électromagnétiques à 20 GHz en milieu déterministe (non turbulent).
*Figure 21 : Différence (de dB) entre la couverture radar en milieu déterministe , et la couverture radar en milieu turbulent obtenue par la méthode stochastique.
*Figure 22 : Différence (de dB) entre la couverture radar en milieu déterministe , et la couverture radar en milieu turbulent obtenue par une approche statistique, sur un ensemble de 150 simulations.
*Picture 1 : Spherical coordinates system used in radar propagation
Picture 2 : Water/sediment interface description (Vertical slice
q = 0°)Picture 3 : Water/sediment interface description (3D view)
Picture 4 : Transmission losses. Modal source mode 1. Slice z = 36m. Left, Nx2D calculus; right, 3D calculus
Picture 5 : Transmission losses. Modal source mode 2. Slice z = 36m. Left, Nx2D calculus; right, 3D calculus
Picture 6 : Transmission losses. Modal source mode 3. Slice z = 36m. Left, Nx2D calculus; right, 3D calculus
Picture 7 : Transmission losses. Point source. Slice
q = 90°. Up, Nx2D calculus; down, 3D calculusPicture 8 : Transmission losses versus range with
q = 90° and z = 36 m. Point source; dotted line, Nx2D calculus; solid line, 3D calculusPicture 9 : Transmission losses in deterministic medium
Picture 10 : Transmission losses in random medium : statistical approach
Picture 11 : Sound speed profile
Picture 12 : Transmission losses difference between deterministic and statistical approaches
Picture 13 : Transmission losses difference between deterministic (in red) and statistical (in green) approaches (receiver depth : Z = 100 m)
Picture 14 : Transmission losses difference between deterministic and stochastic approaches
Picture 15 : Transmission losses difference between deterministic and statistical approaches
Picture 16 : Sound intensity in deterministic medium
Picture 17 : Sound intensity in random medium : statistical approach
Picture 18 : Sound intensity difference between deterministic and statistical approaches
Picture 19 : 40m evaporation duct profile (Battaglia model)
Picture 20 : Loss coverage for a 20 GHz radar, with a deterministic medium
Picture 21 : Loss difference (in dB) between radar propagation in deterministic medium and radar propagation in turbulent medium, using a stochastic approach.
Picture 22 : Loss difference (in dB) between radar propagation in deterministic medium and radar propagation in turbulent medium, using a statistical approach based on 150 simulations.